BADANIE SILNIKA INDUKCYJNEGO
PRZY ZMINANCH NAPIĘCIA I CZĘSTOTLIWOŚCI ZASILANIA
Cel
ćwiczenia:
Celem ćwiczenia jest zapoznanie się z właściwościami silnika
indukcyjnego przy zasilaniu napięciem o wartości i częstotliwości różniących
się od znamionowych. Szczególną uwagę zwrócono na pracę silnika indukcyjnego w
takich warunkach zasilania, przy których wartości napięcia zasilania i
częstotliwości odbiegają od znamionowych, lecz ich wzajemny stosunek pozostaje
niezmienny.
Omówione w ćwiczeniu badania dotyczą pracy silnika
indukcyjnego zasilanego napięciem sinusoidalnym, praktycznie nie
odkształconym, o nastawionej częstotliwości.
1. Zapoznanie
się z układem zasilania
Do wykonania tego ćwiczenia konieczny jest silnik
indukcyjny trójfazowy klatkowy oraz układ zasilający, który musi spełniać
następujące warunki:
a)
Zapewnić możliwość
nastawienia częstotliwości wyjściowej napięcia trójfazowego w granicach od
około 5 do 50Hz;
b)
Zapewnić w
przybliżeniu sinusoidalny przebieg napięcia w czasie z możliwością nastawienia
wartości skutecznej proporcjonalnie do zmian częstotliwości;
c)
Zapewnić możliwie
„sztywną” charakterystykę częstotliwości w funkcji jego prądu
obciążenia;
Warunki takie muszą byś
spełnione, gdy zastosuje się przetwornicę jednotwornikową lub też zespół,
dwumaszynowy silnik obcowzbudny prądu stałego – prądnica synchroniczna.
2. Schemat układu sterowania do badania
silnika indukcyjnego przy nastawionej częstotliwości napięcia zasilania.
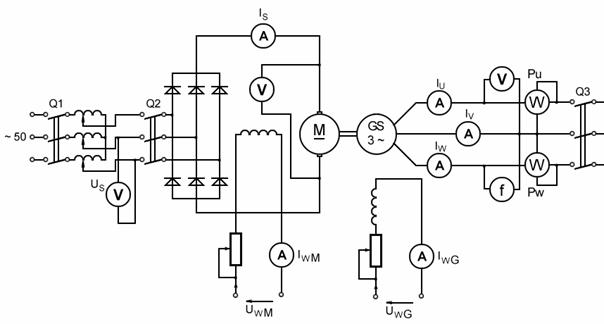
Nastawianie prędkości kątowej
zespołu, a tym samym częstotliwości prądnicy synchronicznej zasilającego badany
silnik indukcyjny będzie zapewnione przez zmianę zasilania twornika silnika
napędowego obcowzbudnego prądu stałego. Nie należy stosować nastawienia
prędkości przez włączenie szeregowe rezystancji do obwodu twornika silnika
obcowzbudnego ze względu na dużą zmianę prędkości kątowej w miarę obciążania
obwodu. Płynną zmianę napięcia zasilania silnika bocznikowego najłatwiej
zapewnić przez zastosowanie trójfazowego prostownika półprzewodnikowego
zasilanego z autotransformatora lub regulatora indukcyjnego. Dobre korekcje
częstotliwości napięcia prądnicy synchronicznej takiego zespołu, których
konieczność wynika w miarę zwiększania obciążenia, można również wykonać przez
zmianę prądu wzbudzenia silnika obcowzbudnego.
Zmianę wartości napięcia prądnicy
synchronicznej o nastawionej częstotliwości uzyskać można przez nastawienie
prądu wzbudzenia IwG
prądnicy synchronicznej, przy czym należy zwrócić uwagę, że dla stałej wartości
prądu wzbudzenia prądnicy synchronicznej nieobciążonej, przy zmianach
częstotliwości, wartość napięcia prądnicy jest proporcjonalna do
częstotliwości. W miarę obciążania obciążenia zespołu dwumaszynowego zwiększa
się oddziaływanie twornika w prądnicy synchronicznej. Dlatego dla uzyskania
stałej wartości napięcia prądnicy konieczna jest zmiana nastawienia prądu
wzbudzenia prądnicy synchronicznej.
Rozruch zespołu dwumaszynowego wykonuje
się przez zwiększenie napięcia strony wtórnej autotransformatora od wartości US=0, aż do
wartości, przy której zespół dwumaszynowy osiągnie wymaganą prędkość kątową, a częstotliwość
napięcia prądnicy synchronicznej, wartość, przy której zespół mają być
prowadzone pomiary.
W czasie rozruchu wartość napięcia UwM i prądu
wzbudzenia IwM silnika obcowzbudnego powinny być równe znamionowym. Moc
znamionowa maszyn zespołu dwumaszynowego powinna być 2,3-krotnie większa od
mocy znamionowej badanego silnika indukcyjnego, ze względu na możliwość
wyznaczenia charakterystyk mechanicznych w szerokim zakresie.
Należy jeszcze zwrócić uwagę na dobór
przyrządów pomiarowych w obwodach o zmiennej częstotliwości. Użycie przyrządów
elektromagnetycznych zapewnia poprawne Pomiary w zakresie 40…60Hz
przyrządów magnetoelektrycznych z prostownikiem powyżej 20Hz, natomiast
przyrządy termoelektryczne pracują niezależnie od częstotliwości przebiegu
mierzonego.
3. Pomiary charakterystyk
biegu jałowego silnika indukcyjnego dla częstotliwości napięcia zasilanego.
Pomiary charakterystyk wykonuję się dla
częstotliwości zasilania silnika indukcyjnego wynoszących f=50, 40, 30, 20, 10,
5Hz w układzie pomiarowym pokazanym na schemacie Nr1. Rozruch częstotliwościowy
silnika indukcyjnego przeprowadza się w następujący sposób:
a)
Nastawia się prąd
wzbudzenia silnika obcowzbudnego prądu stałego zespołu dwumaszynowego na
wartość znamionową IwM
= IwMn;
b)
Nastawia się
wartość prądu wzbudzenia generatora synchronicznego, zbliżoną do wartości IwG0, przy której
prądnica wirująca ze znamionową prędkością kątową ma przy biegu jałowym
napięcie równe znamionowemu;
c)
Załącza się włącznik
Q3, a następnie Q1, doprowadzając napięcie trójfazowe zasilające
autotransformator;
d)
Napięcie
wyjściowe autotransformatora nastawia się na wartość zbliżoną do zera i załącza
włącznik Q2 zasilający prostownik;
e)
Powoli
podwyższając napięcie wyjściowe autotransformatora doprowadza się układ do
zasilania badanego silnika indukcyjnego napięciem przemiennym o żądanej
częstotliwości;
f)
Korygując wartość
prądu wzbudzenia prądnicy synchronicznej ustala się wartość skuteczną napięcia
U0
zasilającego silnik.
Charakterystykę
biegu jałowego mierzy się dla nieobciążonego silnika indukcyjnego rozpoczynając
od napięcia o wartości ![]() notując wartości
napięcia
notując wartości
napięcia ![]() , prądu biegu jałowego
, prądu biegu jałowego ![]() oraz mocy pobieranej przy
biegu jałowym
oraz mocy pobieranej przy
biegu jałowym
4. Tabela pomiarowa NR1
|
L.p. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Hz |
V |
A |
A |
A |
A |
W |
W |
W |
--- |
W |
W |
|
W |
|
|
1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Mierzyć należy następujące wielkości
badanego silnika indukcyjnego: napięcie zasilania ![]() , częstotliwość napięcia zasilającego
, częstotliwość napięcia zasilającego![]() , prąd biegu jałowego
, prąd biegu jałowego ![]() , (wyznaczony jako wartość średnia z pomiarów prądów fazowych
, (wyznaczony jako wartość średnia z pomiarów prądów fazowych
![]() ,
,![]() ,
,![]() ) oraz moc pobieraną przy biegu jałowym
) oraz moc pobieraną przy biegu jałowym ![]() (jako sumę wskazań watomierzy
(jako sumę wskazań watomierzy ![]() ,
,![]() ). Ponadto korzystając z tachometru bądź z prądnicy
tachometrycznej umieszczonej na wale badanego silnika indukcyjnego należy
zmierzyć jego prędkość kątową
). Ponadto korzystając z tachometru bądź z prądnicy
tachometrycznej umieszczonej na wale badanego silnika indukcyjnego należy
zmierzyć jego prędkość kątową ![]() . Pomiary biegu jałowego dla danej częstotliwości zasilania
kończy się przy takiej wartości napięcia zasilania, przy której następuje
zmniejszenie prędkości kontowej wirowania (zwykle przy napięciu zasilania
. Pomiary biegu jałowego dla danej częstotliwości zasilania
kończy się przy takiej wartości napięcia zasilania, przy której następuje
zmniejszenie prędkości kontowej wirowania (zwykle przy napięciu zasilania ![]() ). Wyniki należy zanotować w tabeli pomiarowej. W tabeli
notuje się także moc strat jałowych
). Wyniki należy zanotować w tabeli pomiarowej. W tabeli
notuje się także moc strat jałowych ![]() obliczoną z zależności
obliczoną z zależności
![]() , przy czym
, przy czym ![]() oznacza rezystancję uzwojenia fazowego stojana.
oznacza rezystancję uzwojenia fazowego stojana.
Do pomiarów wielkości elektrycznych
używa się przyrządów magnetoelektrycznych z prostownikiem, jednak przy
częstotliwości, f=10Hz wskazówki tych mierników wykonują ruchy drgające, co
uniemożliwia poprawny odczyt, oraz zmniejsza dokładność wskazań. Dla małych
częstotliwości zaleca się stosowanie przyrządów termoelektrycznych, przy
których należy pamiętać jednak o dłuższym czasie ustalania się wskazań.
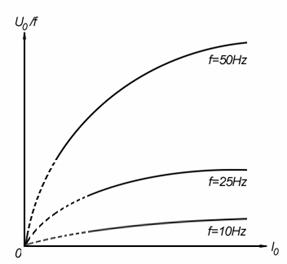
Na podstawie wyników pomiarowych
umieszczonych w tabeli wykreślić bądź obliczeniowo wyznaczyć:
a) ![]() ;
; ![]() ;
; ![]() - charakterystyka
biegu jałowego przy zadanej częstotliwości; Rys. 1
- charakterystyka
biegu jałowego przy zadanej częstotliwości; Rys. 1
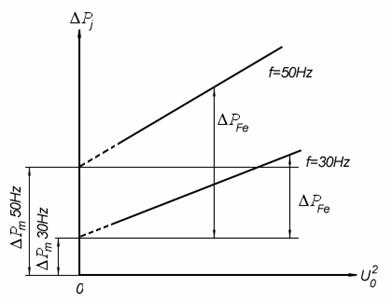
c) ![]() - rozdział strat
jałowych na straty mechaniczne i straty w rdzeniu dla zadanych częstotliwości; Rys. 2
- rozdział strat
jałowych na straty mechaniczne i straty w rdzeniu dla zadanych częstotliwości; Rys. 2
d) ![]() - zależność strat
mechanicznych od prędkości wirowania; Rys.3
- zależność strat
mechanicznych od prędkości wirowania; Rys.3
Rys.
1
Rys.
2
Rys. 3
5. Wyznaczenie
charakterystyk mechanicznych silnika indukcyjnego dla różnych wartości
częstotliwości napięcia zasilania przy stałym stosunku U/f
Wyznaczenie charakterystyk mechanicznych badanego
silnika indukcyjnego wykonuje się w układzie przedstawionym poniżej.
Silnik badany M1 sprzęga się z
hamownicą elektromaszynową M2 z możliwością pomiaru momentu
elektromechanicznego.
Napięcie wyjściowe przetwornicy
częstotliwości ustala się na wartości ![]() przy częstotliwości,
przy której wykonuje się pomiary, zapewniając w ten sposób stałą wartość
stosunku
przy częstotliwości,
przy której wykonuje się pomiary, zapewniając w ten sposób stałą wartość
stosunku ![]()
Układ hamownicy
elektromaszynowej powinien umożliwiać obciążenie silnika momentem równym około ![]() silnika badanego, aby charakterystyki można było wyznaczyć w
zakresie od momentu M=0 do wartości momentu krytycznego silnika.
silnika badanego, aby charakterystyki można było wyznaczyć w
zakresie od momentu M=0 do wartości momentu krytycznego silnika.
W czasie pomiarów należy mierzyć i notować
w tabeli NR2 napięcie zasilania badanego silnika indukcyjnego U, częstotliwość napięcia zasilania f, prądy fazowe pobierane przez silnik ![]() ,
, ![]() ,
, ![]() oraz prąd średni
oraz prąd średni ![]() , moc elektryczną pobieraną przez silnik
, moc elektryczną pobieraną przez silnik ![]() jako sumę wskazań
watomierzy
jako sumę wskazań
watomierzy ![]() i
i ![]() , prędkość kątową
, prędkość kątową ![]() , moment obciążenia
, moment obciążenia![]() . Jeżeli przyrząd do pomiaru prędkości jest wyskalowany dla
wielkości n (w obr/min), należy
wyznaczyć prędkość kątową silnika jako
. Jeżeli przyrząd do pomiaru prędkości jest wyskalowany dla
wielkości n (w obr/min), należy
wyznaczyć prędkość kątową silnika jako ![]()
Ponadto
należy wyznaczyć moc mechaniczną wydawaną przez silnik![]()
Sprawność
silnika ![]() , prędkość kątową pola wirującego dla danej częstotliwości
napięcia zasilania i liczby par biegunów p silnika
, prędkość kątową pola wirującego dla danej częstotliwości
napięcia zasilania i liczby par biegunów p silnika ![]() , poślizg
, poślizg  , współczynnik mocy
, współczynnik mocy 
Pomiary należy wykonywać dla częstotliwości
50Hz, 40Hz, 30Hz, 20Hz, 10Hz, odpowiednio szybko dla stanu przeciążenia silnika
![]() oraz małych
częstotliwości zasilania, kiedy istnieje niebezpieczeństwo nadmiernego
przegrzania silnika badanego.
oraz małych
częstotliwości zasilania, kiedy istnieje niebezpieczeństwo nadmiernego
przegrzania silnika badanego.
6. Tabela pomiarowa NR2
|
L.p. |
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
s |
|
Hz |
V |
A |
A |
A |
A |
W |
W |
W |
rad/s |
|
W |
--- |
rad/s |
--- |
|
|
1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
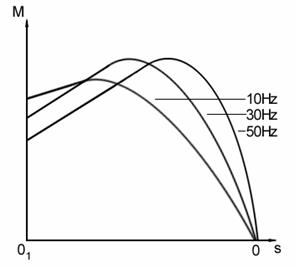
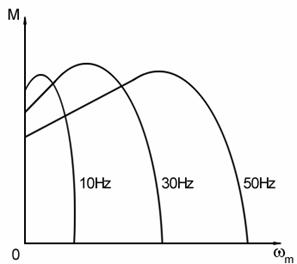
7. Charakterystyki
mechaniczne silnika indukcyjnego przy różnych częstotliwościach napięcia
zasilania i stałym stosunku U/f:
a) w podziałce
poślizgu s Rys. 4
b) w podziale
prędkości kątowej ![]() Rys. 5
Rys. 5
Rys. 4
Rys. 5
8. Pomiary momentu
rozruchowego silnika indukcyjnego w funkcji częstotliwości dla stałego stosunku
U/f
Pomiary te wykonuje się również w układzie
przedstawionym na schemacie 2, z tym jednak, że wirnik hamownicy
elektromaszynowej musi być sztywno i bezpiecznie unieruchomiony względem
stojana hamownicy. Dla określonej częstotliwości zasilania moment rozruchowy MR mierzy się dla
kilku wartości napięcia U=0, a kończąc, gdy prąd pobierany przez zatrzymany
silnik indukcyjny osiągnie wartość znamionową. W tabeli 3 notuje się wyniki
tego pomiaru, na podstawie, których należy wykonać wykresy.
|
L.p. |
|
|
|
|
|
|
|
|
Hz |
V |
A |
A |
A |
A |
|
|
|
1. |
|
|
|
|
|
|
|
|
2. |
|
|
|
|
|
|
|
|
3. |
|
|
|
|
|
|
|
|
4. |
|
|
|
|
|
|
|
|
5. |
|
|
|
|
|
|
|
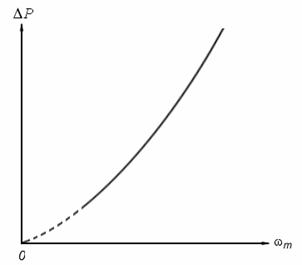
9. Przykładowe wykresy
charakterystyk momentu rozruchowego MR
silnika indukcyjnego dla różnych wartości częstotliwości napięcia zasilania:
a) w funkcji
napięcia zasilania Rys. 6
b) w
funkcji częstotliwości napięcia zasilania przy stałym stosunku U/f Rys. 7
Rys. 6
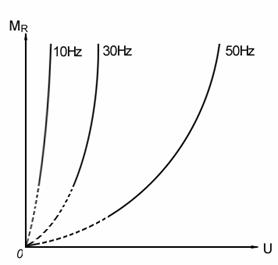
Rys. 7